The Many Faces of ex
October 18, 2024
In precalculus, Euler's constant is typically introduced in the context of compound interest, usually defined as
which makes sense, but maybe feels a little unmotivated. Then in Calculus I, it gets defined as
which is already confusing; what happened to , times? But then you reach your first differential equations course, where is defined as the unique solution to
And of course, there's always Euler's formula
leading to the crown jewel of math adorned on the T-shirts of math nerds everywhere, . What unifies these seemingly disparate representations?
Exponentials as Flow
We'll reach the true definition of the exponential in due time, but the most helpful stepping stone is its defining differential equation. As you may remember from your first ODEs course, the following system
has the solution (remember, can be a vector, in which case is a matrix and is computed using the power series). It's easy to verify this algebraically, but let's take a moment to really understand what this system is telling us.
- is a point in space, and this ODE tells us how changes
- tells us the direction moves
- points us in the direction , relative to our current position
- means "always move in the direction , relative to your current position"
The "relative to your current position" part is crucial; let's review a classic example to understand what's happening here. Remember Euler's formula, ? It tells us that walks us around a circle for seconds. Unsurprisingly, it's the solution to the differential equation
Again, easy to check algebraically, but what's doing there? Well, remember that represents a 90° rotation in the complex plane, which means our velocity is always rotated 90° relative to our current position, i.e. it's tangential.
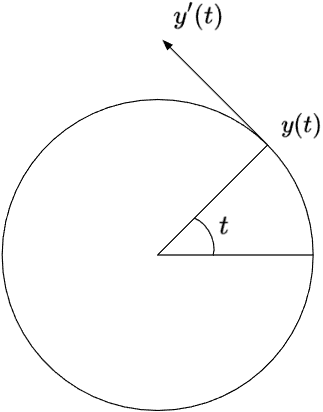
If you remember your physics classes, this diagram should look familiar. If your velocity is always rotated 90° from your position, then you move in a circle. So if your velocity, , is always a 90° rotation of your position, , then of course you move in a circle!
The Lie Connection
More generally, what means is that at any point in space, the flow direction at that point is . So if is our solution, that means it must move us along the flow for seconds. If we set and , we can flip the definition around to give us . A more complete definition is
Consider a path starting at the identity, so . If the velocity at every point is , then we define . More generally, .1
It may feel too abstract, but the abstraction lets us think about in a much more general way. Returning to the example, Euler's theorem almost becomes trivial: at every point , the flow direction is , so walks us along the flow field for seconds. The flow field is pointing in a circle, so we walk in a circle!
We can use this definition to help demystify our previous definitions:
- We can think of compound interest as being a flow field on the number line. The amount of money you gain is proportional to the amount of money you have now, so if is the money in your account, then . is the amount of money you make after investing $1 and compounding for a year, since we followed the flow field for one year. No wonder shows up!
- The power series is its own derivative (easy to check, just use the power rule), which means the flow field at is just itself. This matches the form prescribed in our definition, so we have that .2
But this new definition lets us do a whole lot more:
- Consider a velocity field . Then , by definition, tells us where every point in space lands after moving along the velocity field for one second.
- A skew symmetric matrix, like , always represents a 90° rotation. As we learned from our example, following the flow field of a 90° rotation moves you in a circle, so of a skew-symmetric matrix generates rotations.
- doesn't seem like something you can exponentiate, but it's more than possible. Remember, gives us the velocity of . So if moves us along the flow field for one second, that means moves us along the velocity of for one second. That just brings us to one second in the future! In other words, . Thus, we derive the shift operator.
So why's this section called The Lie Connection? Well, the definition of the exponential from earlier is typically formulated according to Lie Theory (pronounced "Lee"), which explores integration of differential equations on smooth surfaces (manifolds). Lie theory is helpful for working with commonly used rotation groups such as , , and , which are heavily used in optimization and robotics.
If all this abstract exponentiation seems useless, I'll soon be uploading an article on how you can use it to numerically solve partial differential equations!
Update 10/19/24: Here is an appendix demonstrating some algebraic facts about exponentials.
Update 10/24/24: I've posted the article on applications of abstract exponentiation, available here.
Footnotes
-
We don't actually need to define as , since it follows from the previous statements. Try proving it yourself! Hint: use the chain rule. ↩
-
There's a slightly caveat with the power series that often goes unaddressed. We want to be , but evaluating the power series at , we get , which is undefined. The reason we leave undefined is because the function is discontinuous at :
We can eliminate the ambiguity if we only care about continuity from one direction. Since the exponents are integers (so continuity doesn't matter), we can guarantee continuity in by defining for power series in general. ↩